Road Traversing Knowledge (RTK) Dataset
On this page we provide images captured by a low-cost camera (HP Webcam HD-4110). This dataset contains roads with different surface types: asphalt variations, other types of pavement and even unpaved roads. Contains also situations with road damages (eg.: potholes). The images were captured in a moving vehicle in Águas Mornas and Santo Amaro da Imperatriz cities, neighboring Florianópolis in the state of Santa Catarina, Brazil. We also make a large part of the frames separated by their classes, as test data.
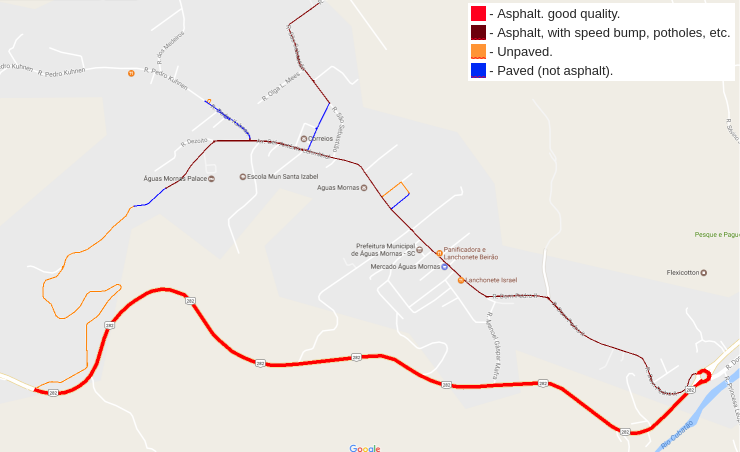
Part of the image collection map.
Citation
If you use the dataset, the Ground Truth, or the image classification approach, please cite as:
author = {Thiago Rateke and Karla Aparecida Justen and Aldo von Wangenheim},
title = {Road Surface Classification with Images Captured From Low-cost Cameras – Road Traversing Knowledge (RTK) Dataset},
journal = {Revista de Informática Teórica e Aplicada (RITA)},
year = {2019},
doi = {https://doi.org/10.22456/2175-2745.91522},
}
If you use the Ground Truth or the semantic segmentation approach, please cite as:
title = {Road surface detection and differentiation considering surface damages},
author = {Thiago Rateke and Aldo von Wangenheim},
journal = {Autonomous Robots},
year = {2021},
month = {Jan},
day = {11},
issn = {1573-7527},
doi = {10.1007/s10514-020-09964-3},
url = {https://doi.org/10.1007/s10514-020-09964-3}
}
Data
The data is separated into 4 collections sequences, they are numbered sequentially, all parts of each collection can be extracted in the same directory.
For the classified data (GT), are numbered sequentially for each collection and each surface type.
- Total frames: 77547
- Total frames in 18102016: 22107
- Total frames in 15022017: 30969
- Total frames in 31032017: 9702
- Total frames in 14042017: 14769
- Total classified frames: 62662
- Total classified frames as asphalt: 43263
- Total classified frames as paved: 13697
- Total classified frames as unpaved: 5702
We also provide a GT with frames classified by road surface quality.
- Total classified frames for surface quality: 6297
- Total classified frames as asphalt(Good): 1978
- Total classified frames as asphalt(Regular): 839
- Total classified frames as asphalt(Bad): 464
- Total classified frames as paved(Good): 1179
- Total classified frames as paved(Regular): 324
- Total classified frames as paved(Bad): 124
- Total classified frames as unpaved(Regular): 796
- Total classified frames as unpaved(Bad): 593
A road surface semantic segmentation GT it’s also available. This GT contains 701 frames. Classes are defined as follows:
- Background, everything being unrelated to the road surface;
- Asphalt, roads with asphalt surface;
- Paved, different pavements (eg.: Cobblestone);
- Unpaved, for unpaved roads;
- Markings, to the road markings;
- Speed-Bump, for the speed-bumps on the road;
- Cats-Eye, for the cats-eye found on the road, both on the side and in the center of the path;
- Storm-Drain, usually at the side edges of the road;
- Patch, for the various patches found on asphalt road;
- Water-Puddle, we use this class also for muddy regions;
- Pothole, for different types and sizes of potholes, no matter if they are on asphalt, paved or unpaved roads;
- Cracks, used in different road damages, like ruptures.
18102016

15022017

31032017

14042017

Road Surface Quality GT

|
GT (quality classified data) |
|---|
| asphalt(Good) |
| asphalt(Regular) |
| asphalt(Bad) |
| paved(Good) |
| paved(Regular) |
| paved(Bad) |
| unpaved(Regular) |
| unpaved(Bad) |
Semantic Segmentation GT
|
GT (semantic segmentation) |
|---|
| Original Frames |
| No color map Mask frames |
| Mask frames |
| JSON |