An autonomous vehicle needs to identify various elements along the way, such as: the road ahead, whether there is a need to deviate from fixed or moving obstacles and even stop. A smart vehicle can use different sensors for the perception of the surroundings. In our model, we separated the perception and proprioception of the vehicle in 4 modules: 1) Road Detection, taking into into account possible changes in the terrain pattern (asphalt, dirt road, and cobblestones), and if there are speed bumps or potholes on the pavement. 2) Obstacles and Object Recognition, which could be: other vehicles, people, animals, street signs and unexpected structures on the road. 3) Signal Recognition, such as amplitude of irregularities on the road and skid. 4) Proprioception of the Vehicle, which must take into account the information provided by the vehicle: speed, acceleration, brake, steering, headlight, etc. All of this information is passed to a Intelligent Agent module for data interpretation and decision making or issuing alerts.
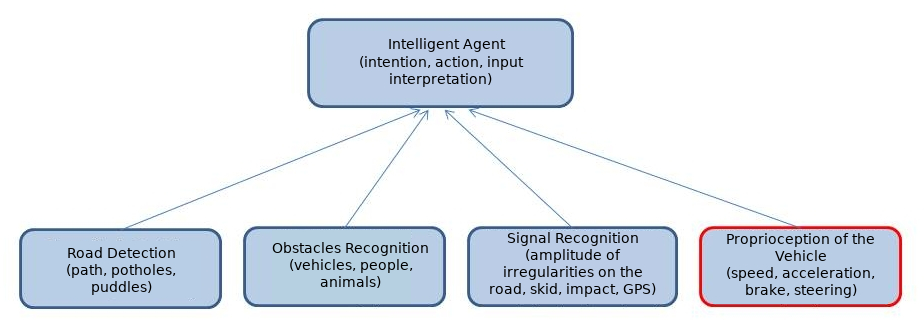
Project Modules